El nuevo robot humanoide para equipos pesados de JR West está diseñado para aumentar la productividad y mantener a los trabajadores fuera de peligro.
Fuente: Newatlas
West Japan Rail Company ha publicado un vídeo de su nuevo robot humanoide de equipo pesado. Montado en el extremo de una grúa, este torso de robot estilo “gundam” imita los movimientos del brazo y la cabeza de un piloto humano, que ve a través de los ojos del robot a través de gafas de realidad virtual.
Los objetivos clave aquí, según la empresa, son “mejorar la productividad y la seguridad”, permitiendo a los trabajadores levantar y manipular naturalmente equipos pesados alrededor del sistema ferroviario sin exponerlos al riesgo de descargas eléctricas o caídas.
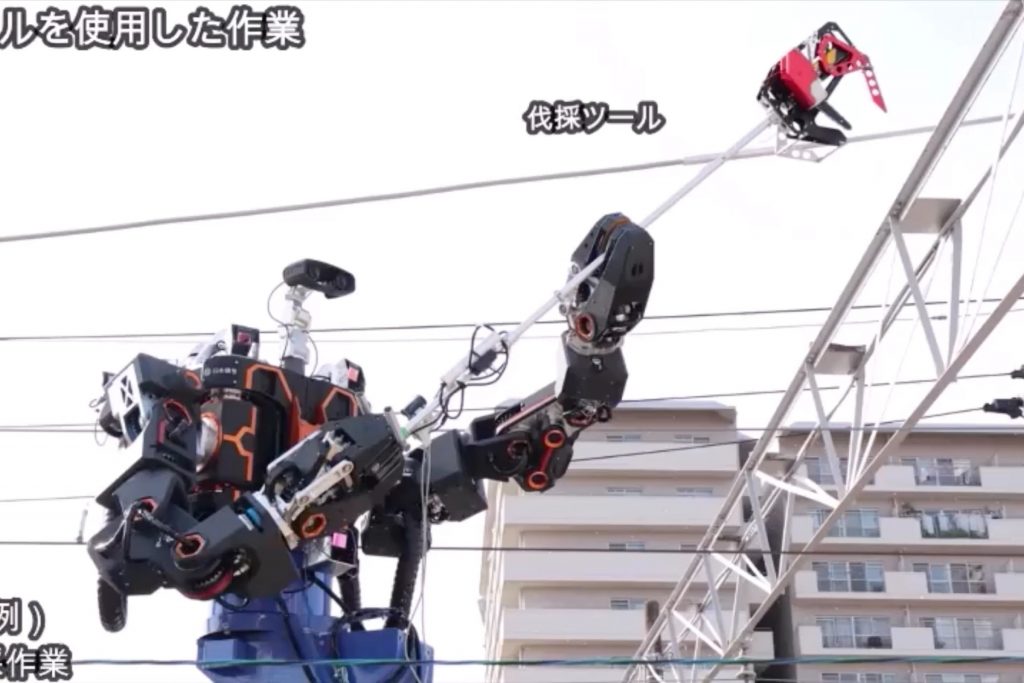
El gran torso del robot está montado en un brazo de grúa hidráulica, que se desplaza alrededor del sistema de rieles en un vagón de rieles especialmente reforzado, colocando patas estabilizadoras cuando llega el momento de ir a trabajar.
Un piloto humano se pone un conjunto de gafas de realidad virtual, que tienen seguimiento de movimiento para controlar los movimientos de una cabeza al estilo de Wall-E con visión estéreo. Agarrando un par de manijas, el piloto puede mover los brazos y las manos del robot, y si una fuerza externa, como un peso, mueve los brazos del robot, este movimiento se refleja en los controles del piloto.

Un video publicado en Twitter muestra al robot levantando y colocando algunos componentes de tamaño razonable, así como limpiando estructuras de rieles superiores con un cepillo especial multiángulo. Agarra todas estas herramientas en lo que parecen “manos” similares a abrazaderas relativamente simples, mostrando un grado razonable de destreza, aunque operando a una velocidad bastante lenta.

Por lo general, cualquier intento de hacer que un robot parezca humanoide nos haría pensar que probablemente no funcionaría tan bien como lo haría si no pareciera humanoide. Pero en este caso, tiene sentido: el piloto puede obtener rápidamente una sensación cinética para operar el robot, ya que sus brazos y cabeza están en lugares familiares entre sí.
JR West está desarrollando esta máquina en asociación con Human Machinery co. y Nippon Signal co. No podemos adivinar qué sigue para esta bestia de hombros anchos a partir del comunicado de prensa, pero puedes disfrutar del video a continuación.
【News Release】
— JR西日本ニュース【公式】 (@news_jrwest) April 15, 2022
生産性・安全性向上に向けて、株式会社人機一体および日本信号株式会社と共同で、人型重機ロボットと鉄道工事用車両を融合させた多機能鉄道重機を開発しています。
詳しくはこちらをご覧ください。https://t.co/R8X32nmuJU pic.twitter.com/FBVjIe1xCC