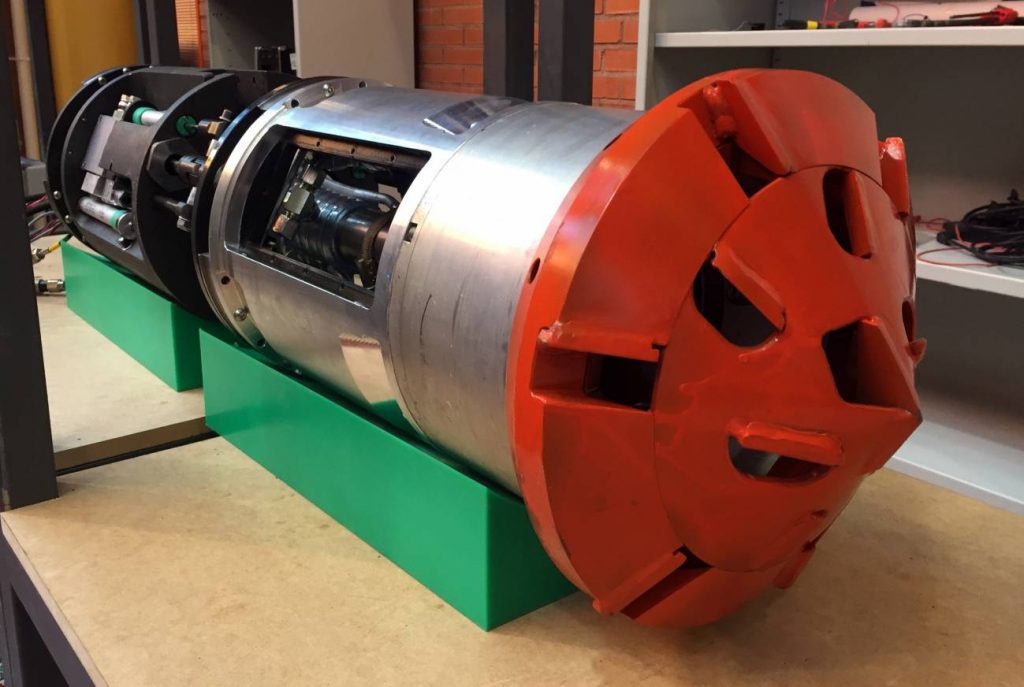
Los miembros del proyecto de investigación europeo BADGER, coordinado por la Universidad Carlos III de Madrid (UC3M), han presentado un prototipo de un robot autónomo subterráneo con navegación inteligente destinado a entornos urbanos.
Este sistema robotizado se compone fundamentalmente de dos elementos: un vehículo de superficie con un georradar con el que se escanea el terreno, de manera que se puedan conocer los obstáculos que hay bajo el subsuelo, y el propio robot subterráneo autónomo para realizar trabajos de perforación. “Una vez escaneado el subsuelo con el rover, con un software se realiza un plan de trabajo y se establece un punto de entrada y un punto de salida de la obra a realizar, para después llevar el robot y comenzar a perforar”, explican sus creadores.
En Europa se estima que se llevan a cabo unos 500.000 trabajos al año de obra civil para la instalación de cableado, tuberías y otro tipo de canalizaciones subterráneas de pequeño diámetro. Habitualmente, estos trabajos se realizan abriendo una zanja, extendiendo la tubería y posteriormente tapando la zanja. “La ventaja que tiene este robot es que se pueden realizar esos mismos trabajos haciendo una perforación, sin tener que abrir una zanja, lo que evita ruido, contaminación y molestias a los ciudadanos”, apunta sus desarrolladores.
Hasta ahora, ya se han realizado varios test de perforación subterránea en terrenos de la Comunidad de Madrid y de Lennestadt (Alemania) y aún continúa su desarrollo con el objetivo de comenzar a realizar pruebas en entornos urbanos reales. Los investigadores estiman que podría estar listo para funcionar en ciudades en un plazo de 2 o 3 años.
“El empleo de técnicas innovadoras de localización, mapeo y navegación, así como de sensores y georadares, permitirán su adaptación a distintos terrenos”, explican, añadiendo que “la introducción de estas tecnologías robóticas avanzadas, con capacidades cognitivas y de control, tiene múltiples aplicaciones. Incrementará la competitividad europea en operaciones de búsqueda y rescate (derrumbamientos…), extracción de minas, aplicaciones con uso civil (como conducciones de aguas, gas, fibra óptica…), técnicas de exploración, mapeo, etcétera”.
+Información: www.badger-robotics.eu